DC-Car-Systeem5: verschil tussen versies
k |
k |
||
| Regel 14: | Regel 14: | ||
De te overbruggen afstand is hierbij max. 5 meter.<br> | De te overbruggen afstand is hierbij max. 5 meter.<br> | ||
De hoog vermogen zend LED's worden boven de baan, bijvoorbeeld aan het plafond, aangebracht en bestrijken gemiddeld een oppervlak van 1 m2.<br> | De hoog vermogen zend LED's worden boven de baan, bijvoorbeeld aan het plafond, aangebracht en bestrijken gemiddeld een oppervlak van 1 m2.<br> | ||
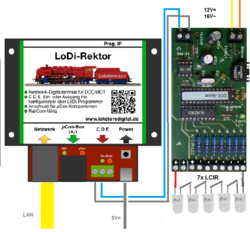
| − | De [[LCIR| lange afstand ontvanger (LCIR)]] werkt met [[: Categorie: DC07 | DC07]] | + | De [[LCIR| lange afstand ontvanger (LCIR)]] werkt met [[: Categorie: DC07 | DC07]] , [[: Categorie: DC08 | DC08]] , [[: Categorie: DC09 | DC09]] en [[: Categorie: DC10 | DC10]] .<br> |
Meer info treft u hier: [http://www.miniatuura.nl/miniatuura/?p=41 Werken met de digitale centrale (lange afstand IR)]<br> | Meer info treft u hier: [http://www.miniatuura.nl/miniatuura/?p=41 Werken met de digitale centrale (lange afstand IR)]<br> | ||
<br> | <br> | ||
Huidige versie van 16 jan 2024 om 07:04

|
Computer gestuurd via digitale centrale Bij computer gestuurd rijden maken we bij voorkeur gebruik van lange afstand infrarood besturing.
Omdat de computer moet weten welke auto zich waar bevindt moeten er terugmelding plaats vinden, dat gaat via een S88 terugmeld module.
Bij terugmelding d.m.v. (sleper) magneten maken we gebruik van de RmS88 terugmeld module en Hall sensoren hiervoor hebben we speciale makkelijk in te bouwen Hall sensoren beschikbaar. Eventueel kunt u ook gebruikmaken van reedcontacten als magneet opnemers. Mogelijke functies: |