DC-Car-Systeem5: verschil tussen versies
k |
k |
||
| (15 tussenliggende revisies door 2 gebruikers niet weergegeven) | |||
| Regel 1: | Regel 1: | ||
| + | [[Bestand:Booster-Prinzip2.jpg|250px|right]] | ||
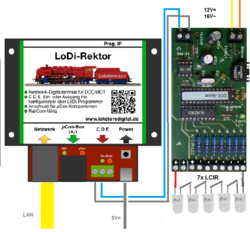
| + | [[Bestand:LoDi-DC-Car-LCIR-Booster.png|250px|right|link=DC-Car-LoDi-Booster]] | ||
<table> | <table> | ||
<tr> | <tr> | ||
| Regel 7: | Regel 9: | ||
Met kruispunten en splitsingen <br> </b><br> | Met kruispunten en splitsingen <br> </b><br> | ||
<hr> | <hr> | ||
| − | Bij lange afstand infrarood wordt er een [[LCIR| lange afstand ontvanger (LCIR)]] in het voertuig geplaatst. | + | Bij computer gestuurd rijden maken we bij voorkeur gebruik van lange afstand infrarood besturing. <br> |
| + | Hierbij wordt er een [[LCIR| lange afstand ontvanger (LCIR)]] in het voertuig geplaatst. | ||
De commando's worden via een [[DC-Car-Booster]] verzonden deze wordt met de rail uitgang van de digitale centrale verbonden.<br> | De commando's worden via een [[DC-Car-Booster]] verzonden deze wordt met de rail uitgang van de digitale centrale verbonden.<br> | ||
| − | De te overbruggen afstand is hierbij max 5 meter.<br> | + | De te overbruggen afstand is hierbij max. 5 meter.<br> |
De hoog vermogen zend LED's worden boven de baan, bijvoorbeeld aan het plafond, aangebracht en bestrijken gemiddeld een oppervlak van 1 m2.<br> | De hoog vermogen zend LED's worden boven de baan, bijvoorbeeld aan het plafond, aangebracht en bestrijken gemiddeld een oppervlak van 1 m2.<br> | ||
| − | De [[LCIR| lange afstand ontvanger (LCIR)]] werkt met [[: Categorie: DC07 | DC07]] | + | De [[LCIR| lange afstand ontvanger (LCIR)]] werkt met [[: Categorie: DC07 | DC07]] , [[: Categorie: DC08 | DC08]] , [[: Categorie: DC09 | DC09]] en [[: Categorie: DC10 | DC10]] .<br> |
Meer info treft u hier: [http://www.miniatuura.nl/miniatuura/?p=41 Werken met de digitale centrale (lange afstand IR)]<br> | Meer info treft u hier: [http://www.miniatuura.nl/miniatuura/?p=41 Werken met de digitale centrale (lange afstand IR)]<br> | ||
<br> | <br> | ||
| − | [[Software]] | + | Voor de [[Software]] zijn een groot aantal leveranciers beschikbaar: <br> |
* [[ITrain]] | * [[ITrain]] | ||
* [[Windigipet]] | * [[Windigipet]] | ||
* [[TrainController]] | * [[TrainController]] | ||
| − | |||
* en vele andere.. <br> | * en vele andere.. <br> | ||
<br> | <br> | ||
| − | De splistingen worden aangestuurd door [[Servodecoders| | + | De splistingen worden aangestuurd door [[Servodecoders| servo decoders:]]. <br> |
DC-Car heeft een aantal servodecoders in het programma: [[Servodecoders#S4DCC-Car| S4-Car]], [[Servodecoders#S4DCC| S4]], [[Servodecoders#S8DCC.2FMOT| S8]] en [[Servodecoders#W4DCC.2FMOT| W4]] <br> | DC-Car heeft een aantal servodecoders in het programma: [[Servodecoders#S4DCC-Car| S4-Car]], [[Servodecoders#S4DCC| S4]], [[Servodecoders#S8DCC.2FMOT| S8]] en [[Servodecoders#W4DCC.2FMOT| W4]] <br> | ||
| − | [[ | + | Omdat de computer moet weten welke auto zich waar bevindt moeten er [[Terugmelding| terugmelding]] plaats vinden, dat gaat via een S88 terugmeld module. <br> |
| − | [[ | + | Hier bieden we een aantal mogelijkheden: |
| + | * Terugmelding via magneten en hall sensoren of reed contacten | ||
| + | * Terugmelding via IR sensoren | ||
| + | |||
| + | Bij terugmelding d.m.v. (sleper) magneten maken we gebruik van de [[RmS88]] terugmeld module en Hall sensoren hiervoor hebben we speciale makkelijk in te bouwen Hall sensoren beschikbaar. Eventueel kunt u ook gebruikmaken van reedcontacten als magneet opnemers.<br> | ||
| + | Bij infrarood terugmelding maken we gebruik van de [[RmS88IR|S88IR DC-Car]] terugmeld modules. Deze zijn aangepast voor directe aansluiting van fototransistoren.<br> | ||
<hr> | <hr> | ||
'' Mogelijke functies:'' <br> | '' Mogelijke functies:'' <br> | ||
| Regel 32: | Regel 39: | ||
Geen ingewikkelde bedrading en infra structuur door de infrarood techniek. <br> | Geen ingewikkelde bedrading en infra structuur door de infrarood techniek. <br> | ||
De commando's worden verzonden via IR zenders aan het plafond zoals satellieten. <br> | De commando's worden verzonden via IR zenders aan het plafond zoals satellieten. <br> | ||
| − | Via | + | Via terugmelders weet de computer waar de voertuigen zich bevinden. <br> |
</td> | </td> | ||
| Regel 38: | Regel 45: | ||
</table> | </table> | ||
[[Categorie:Welke_DC-Car_producten_voor_welke_toepassing]] | [[Categorie:Welke_DC-Car_producten_voor_welke_toepassing]] | ||
| + | [[Categorie:DC-Car-Systeem]] | ||
| + | [[Categorie:PC_operatie]] | ||
| + | [[Categorie:Index]] | ||
Huidige versie van 16 jan 2024 om 07:04

|
Computer gestuurd via digitale centrale Bij computer gestuurd rijden maken we bij voorkeur gebruik van lange afstand infrarood besturing.
Omdat de computer moet weten welke auto zich waar bevindt moeten er terugmelding plaats vinden, dat gaat via een S88 terugmeld module.
Bij terugmelding d.m.v. (sleper) magneten maken we gebruik van de RmS88 terugmeld module en Hall sensoren hiervoor hebben we speciale makkelijk in te bouwen Hall sensoren beschikbaar. Eventueel kunt u ook gebruikmaken van reedcontacten als magneet opnemers. Mogelijke functies: |